前から随分と経ってしまいしたが、少しずつ作っています(´・ω・`)あまり形がダイナミックに変わったりはしていないのですけどね。ははは……(現実から顔を背けながら)
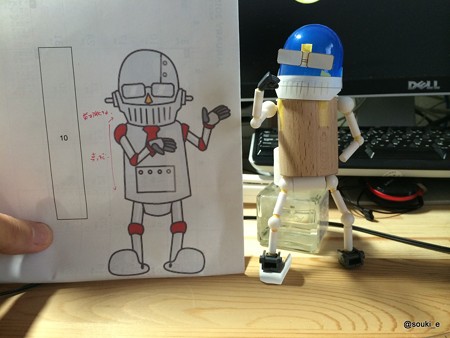
バランス調整の図。胴体は木の筒を使いました。それに穴を開けて、そこにボールジョイントを差し込んで手脚をつけることにしました。重量は増しますが、安定感重視と言うことで。
想定外だったのが、ボールジョイント(イエサブの関節技です)の保持力が高いことでした。余裕で支えられることが分かり、これだったら行けるかな?となりました。

胴体にプラバンを巻いて、あとは細々としたパーツをつけてみたところです。
さすがに胴体を木のままにすると質感が違いすぎる感じがしたので0.3mmのプラバンを曲げてくっつけています。最終的にはディテールアップも兼ねてねじ止めをする予定です。

右手と左手の色が違います。
白はプラパイプです。使い勝手が良いので使っていましたが、どうも固定に難があるので、アルミパイプに変更しました。メタルですよ、メタル!
アルミパイプは二重構造にし、中はボールジョイントの固定用、外は外観と分けました。これでしっかりと固定をして、外観にほとんど影響しないようになりました。あとは塗装をしないで良いというのが一番ですねw

と現状こういうことになっています。足が少し小さい感じがするのですが、アウトラインはできたかなと。まだ各部仮止めにしていますが、これは一度ワンネットさんに持参してバランス確認などをしようと思っているからです|ω・)ノ 写真では伝わらない部分があるのでお時間を作って頂くことにしました(自分の手の遅さが……)
ひとまず今月でここまでできたのでほっとしています。できたら今月中に完成させたかったのですが、私用でドタバタしてしまって手が遅くなってしまって。あと模型環境がほぼ壊滅状態です( ´・ω・`)来月から再構築ですかね……
話が少し変わって。
このロボット社長ですが、無事にLINEスタンプの審査を通過したそうです。おめでとうございます!
ふふふ、現段階でもこのスタンプのポーズは大体できるのですよヽ( ´ω`)ノ